

"NEXTAGE Fillie OPEN"
The history of Kawada Robotics' humanoid robot development began in 1999,
when we were commissioned by the University of Tokyo to develop a humanoid robot.
From that time, we have expanded our robot lineup from the bipedal robots,
the "upper body" type humanoid "HIRO", to the "NEXTAGE" series.
We have developed the "NEXTAGE OPEN" series of research platforms compatible
with open-source robot middleware (ROS) to meet the many requests
we have received from universities and research institutes around the world.
"NEXTAGE Fillie OPEN" has been developed based on feedback from many users of "NEXTAGE OPEN",
and became a research platform that has evolved further by improving the flexibility
that is a major feature of the "NEXTAGE" series.
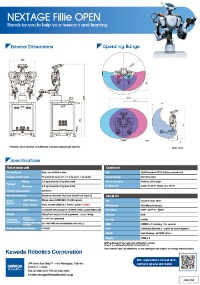
This leaflet includes the specifications and range of motion of the "NEXTAGE Fillie OPEN,
as well as links(QR code) to view videos of "NEXTAGE OPEN" series.
as well as links(QR code) to view videos of "NEXTAGE OPEN" series.

Gallery
NEXTAGE is active in universities and research institutes around the world!




Article
Click here to read the news article about the introduction of "NEXTAGE OPEN"!
We look forward to working with you and "NEXTAGE Fillie OPEN"!
