

"NEXTAGE Fillie OPEN"
ヒト型協働ロボット"NEXTAGE"シリーズの新たな仲間として
2022年3月にリリースした新型"NEXTAGE Fillie"の
研究用プラットフォーム"NEXTAGE Fillie OPEN"をリリースしました!

“NEXTAGE Fillie OPEN”について
カワダロボティクスのヒト型ロボット開発の歴史は、
1999年に東京大学様からヒト型ロボットの開発を受託したことをきっかけに始まりました。
そこから二足歩行ロボット、「上半身」型ヒューマノイド"HIRO"から"NEXTAGE"シリーズとラインナップを増やし、
大学・研究機関様から要望を多くいただいた「研究用プラットフォームとしてのロボットが欲しい」にお応えするために、
オープンソースのロボットミドルウェア(ROS)に対応した
研究用プラットフォーム"NEXTAGE OPEN"シリーズの開発に至りました。
生産現場の様々な作業工程に導入されていて、コンパクトで作業性の高い"NEXTAGE"の特長は
研究開発用としても広くご愛顧いただいてきており、
"NEXTAGE OPEN"シリーズは、国内外の数多くの大学・研究機関様に導入いただいています。
"NEXTAGE Fillie OPEN"は、これまで"NEXTAGE OPEN"を導入いただいた
数多くのユーザー様にフィードバックをいただきながら、
"NEXTAGE"シリーズの大きな特徴である柔軟性を向上させるなど、更に進化した研究用プラットフォームとなっております。
カワダロボティクスのヒト型ロボット開発の歴史は、
1999年に東京大学様からヒト型ロボットの開発を受託したことをきっかけに始まりました。
そこから二足歩行ロボット、「上半身」型ヒューマノイド"HIRO"から"NEXTAGE"シリーズとラインナップを増やし、
大学・研究機関様から要望を多くいただいた「研究用プラットフォームとしてのロボットが欲しい」にお応えするために、
オープンソースのロボットミドルウェア(ROS)に対応した
研究用プラットフォーム"NEXTAGE OPEN"シリーズの開発に至りました。
生産現場の様々な作業工程に導入されていて、コンパクトで作業性の高い"NEXTAGE"の特長は
研究開発用としても広くご愛顧いただいてきており、
"NEXTAGE OPEN"シリーズは、国内外の数多くの大学・研究機関様に導入いただいています。
"NEXTAGE Fillie OPEN"は、これまで"NEXTAGE OPEN"を導入いただいた
数多くのユーザー様にフィードバックをいただきながら、
"NEXTAGE"シリーズの大きな特徴である柔軟性を向上させるなど、更に進化した研究用プラットフォームとなっております。
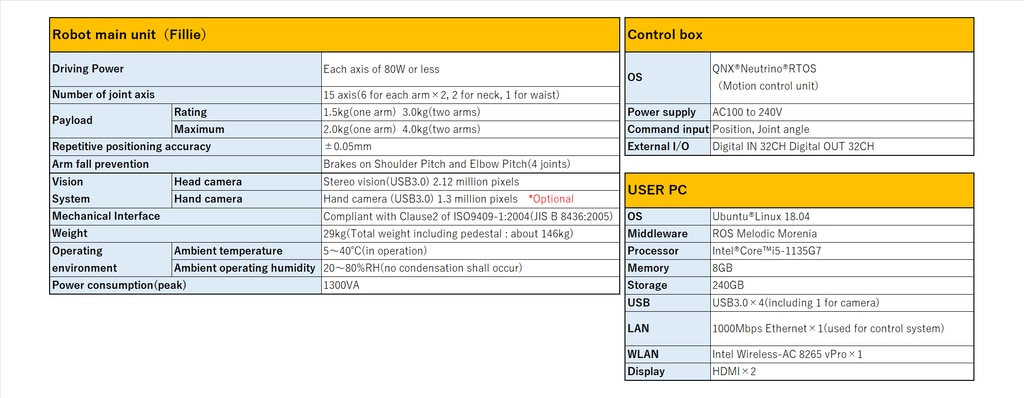
"NEXTAGE Fillie OPEN" スペック表
~「Fillie」の名前について~
これまで様々な業界に導入されてきた「NEXTAGE」は
導入先の方の「同僚」「弟子」「パートナー」etc...
様々な関係性を築いてきました。
今回の名称を決めるにあたっては、そうした様々な関係性を
カワダロボティクスからお客様に提示するのではなく
お客様自身でどういう関係性を築くかを考えて頂き
その関係性を「埋めてね」
というメッセージを込めて
「fill in the blank」を語源にした「Fillie」と名付けました。
これまで様々な業界に導入されてきた「NEXTAGE」は
導入先の方の「同僚」「弟子」「パートナー」etc...
様々な関係性を築いてきました。
今回の名称を決めるにあたっては、そうした様々な関係性を
カワダロボティクスからお客様に提示するのではなく
お客様自身でどういう関係性を築くかを考えて頂き
その関係性を「埋めてね」
というメッセージを込めて
「fill in the blank」を語源にした「Fillie」と名付けました。
